
CK3M-CPU1□1 可编程多轴运动控制器 CK3M系列 CPU单元

产品简介
详细信息
可将客户装置提升限的CK3M
Programmable Multi Axis Controller广泛应用于要求超高速响应性能的精密直线电机驱动控制、纳米级定位控制等以半导体制造装置为代表的设备,赢得客户的高度评价。
CK3M是在紧凑型外壳中汇集了Programmable Multi Axis Controller的强大运动控制能力、多厂商和高开发自由度的欧姆龙新一代运动控制器。为了将客户装置提升限,突破限制的阻碍,引导装置发挥出高性能。
Rapid
【实现纳米级的高精度控制】
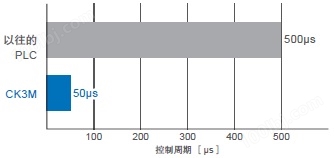
凭借超高速伺服循环运算,高速高精度控制迈入新领域。
压倒性的运算速度可进一步实现客户装置的高精度化。
超高速同步控制
具有伺服循环50μs/5轴的高水平*1的运动控制技术。凭借超高速反馈控制,在精密加工方面可实现高精度的轨迹控制。
*1. 截至2018年3月 本公司调查结果
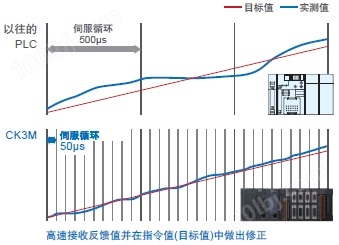
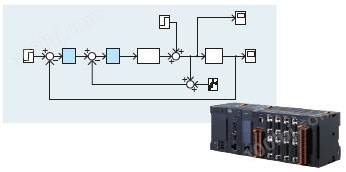
凭借高速伺服循环实现高精度的轨迹控制
通过高速接收反馈值并在指令值(目标值)中做出修正,实现更接近设计值的轨迹控制。
Flexible
【实现较佳设备构成】
支持多厂商的驱动器、光栅尺。
摆脱周边设备的限制,引导客户装置发挥出高性能。
支持高性能光栅尺
支持A/B相信号、串行数据I/F,实现使用高性能光栅尺的高精度定位控制。
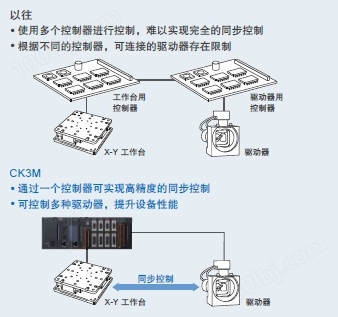
支持多种驱动器
支持基于模拟指令(DAC、PFM/正交脉冲、直接PWM*2)的轴控制。
能够与高响应性的音圈电机和精密的直线电机等各种电机相连接,进行精密的机械动作。
*2. 直接PWM今后计划扩展。
配备EtherCAT® I/F
使用EtherCAT®主站通信端口,可以连接伺服驱动器、变频器、视觉系统、各种传感器和I/O等EtherCAT®从站,构成灵活的系统。
Capable
【通过自定义不断强化】
具有高开发自由度的Programmable Multi Axis Controller架构使装入算法等客户的创意成为现实。
高自由度的编程
能够用C语言/Programmable Multi Axis Controller专用语言/G代码等语言编写客户的复杂、专业算法。

可以自由编写描绘专业而复杂的轨迹的机器人机构的控制程序。
除了自定义标准G代码外,客户还可安装具备功能的G代码。
自定义伺服算法
可以在控制器内添加自己编写的伺服算法。能够实现针对各种机械结构的优化控制。
Easy
【像PLC一样便于使用】
紧凑型外壳能够方便地装入控制柜中。
免工具、可进行DIN导轨安装,提升了客户的安装、更换作业的效率。
采用模块化方式
采用模块式外壳,通过与扩展单元*3组合,可实现多种多样的应用。
*3. CK3M-CPU1□1最多只能使用2台轴接口单元。

免工具&紧凑
单元的连接无需工具,可轻松换接。此外,紧凑的设计*4有助于控制柜的小型化。

*4. 使用CK3W - PD + CK3M - CPU + CK3W - AX*2台。
可进行DIN导轨安装

装入控制系统时,可进行便于固定的DIN导轨安装。