
车载摄像头主动对位设备

产品简介
详细信息
随着汽车产业的不断发展,特别是5G时代的来临,汽车智能化成为汽车发展的趋势。摄像头作为汽车的眼睛,车载摄像头的应用场景和组装量越来越多,特别是应用于自适应巡航,车道偏移等用于主动安全的高级辅助驾驶(ADAS)的前视摄像头的精度及品质要求显得尤为重要,显然传统通过螺纹镜头的锁附的摄像头组装不能符合相关要求,所以主动对位技术成为未来摄像头组装的一个关键制程。
艾微视从2015年就研发出基于倒车影像的摄像头组装主动安全的原型机,随着每年一迭代的速度,现已发展到第5代车载主动对位设备。
从功能角度具备Plasma, 白板检测,点胶,胶量检测,平整度检测,镜头检测,主动对位及离焦距离检测等功能,同时应用角度支持各类车载摄像头诸如360环视广角,ADAS前视小角度组装,支持对位镜头或对位图像芯片。
艾微视主动对位设备在中国客户已广泛取得应用,是国内多,量产经验,技术级别的设备。取得如此高的成绩源于我们对车载摄像头组装的专注及我们的技术迭代,我们拥有其他公司无法具备的自动化,光学,电子,软件四大核心团队,无论从客户需求的内容和响应时间上都能快速给出方案和落地措施。
艾微视主动对位设备在中国客户已广泛取得应用,是国内多,量产经验,技术级别的设备。取得如此高的成绩源于我们对车载摄像头组装的专注及我们的技术迭代,我们拥有其他公司无法具备的自动化,光学,电子,软件四大核心团队,无论从客户需求的内容和响应时间上都能快速给出方案和落地措施。
| 01 | 功能 |  |
| - 手动/自动上下料Plasma清洁和活化 - 芯片脏污检测 - 自动点胶 - 视觉检测 - 自动AA调焦 - UV预固化 - 平整度检测(可选) - 离焦距离测量(可选) - 镜头测试(可选) | ||
| 02 | 重复定位精度 | |
| - X, Y, Z: ±0.5um - θX, θY, θZ: ±0.003° | ||
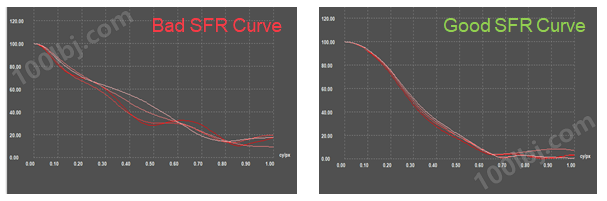
| 03 | 目标图卡 | |
| - 平行光管(15~240°) - 扇形SFR图卡 | ||
| 04 | AA指标参数 | |
| - 对位时间<12s - 对位光轴精度:±1像素 - 倾斜角度:<0.1° | ||
| 05 | UPH | |
| - 120~144(360AVM) - 90~100(ADAS) |
主动对位技术涉及比较广泛,需要从图像质量分析技术,光学技术,软件算法,图像采集电子硬件,自动化集成等多方面的技术支撑。
1)图像质量分析
“图像质量指图像在不同的图像系统的采集,处理,存储,压缩,传输,显示的准确性水平。另一种是指图像所有的视觉上的重要属性的加权组合。”--《Image Quality Metrics》 书籍
我们这里借由图像质量分析技术来作为我们主动对位调整的一个基础,所以一套高效可靠的图像分析技术显得尤为重要,举个简单的例子,我们很多车载环视360摄像头最终输出图像都会带有图像锐化功能,这是人为增加图像清晰度的一个手段,但它不是真实硬件的反映,所以在实际主动对位要求上,我们要求能去掉锐化,如果无法除掉锐化,我们必须想办法把锐化带来的影响降到。
2)光学技术
| 因为摄像头是一个光学产品,而我们要做的也是把镜头和图像传感器的相对位置按应用需求进 行调整和固定,而这里应用的光学技术也相对比较广泛。 -光学环境的搭建,其中包括图卡,光源,平行光管等。 -光学对主动对位提供的理论支持。 | 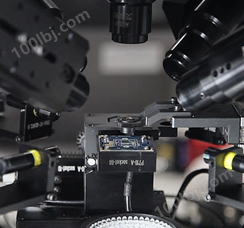 |
3)软件算法
| 基于主动对位的算法,我们采用C/C++来实现,一方面要进行图像的实时分析,另一方面还要对硬件及运动部件的操控。我们这里软件算法着重表现在以下几个方面: -角点识别,清晰度算法 -主动对位算法 -光轴及离焦距离补偿算法 | 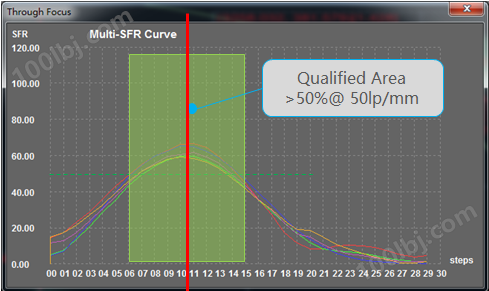 |
4)图像采集电子硬件
| 现在摄像头的种类接口越来越多,如何快速有效地并兼容实现图像采集是很必要的,另外随着摄像头分辨率及传输速度越来越快,对采集卡的硬件要求也越来越高。基于以上的需求,我司自行开发图像采集板,满足客户不同的图像采集需求。 |  |
5)自动化集成
| 以上4点是我们完成主动对位的关键点,自动化集成是所有的基础而且也十分重要,机械精度的稳定性也直接影响到主动对位的结果,而且为了兼容各类摄像头,自动化集成也接受了很多很多的挑战。我们不仅可以支持不同视场角的摄像头,且也支持不同测试距离,不同主动对位方式,而这些都需要自动化非常大的支撑。 |  |