
RM01 机械手夹具





产品简介
详细信息

EASYARM-让您的工作更轻松!
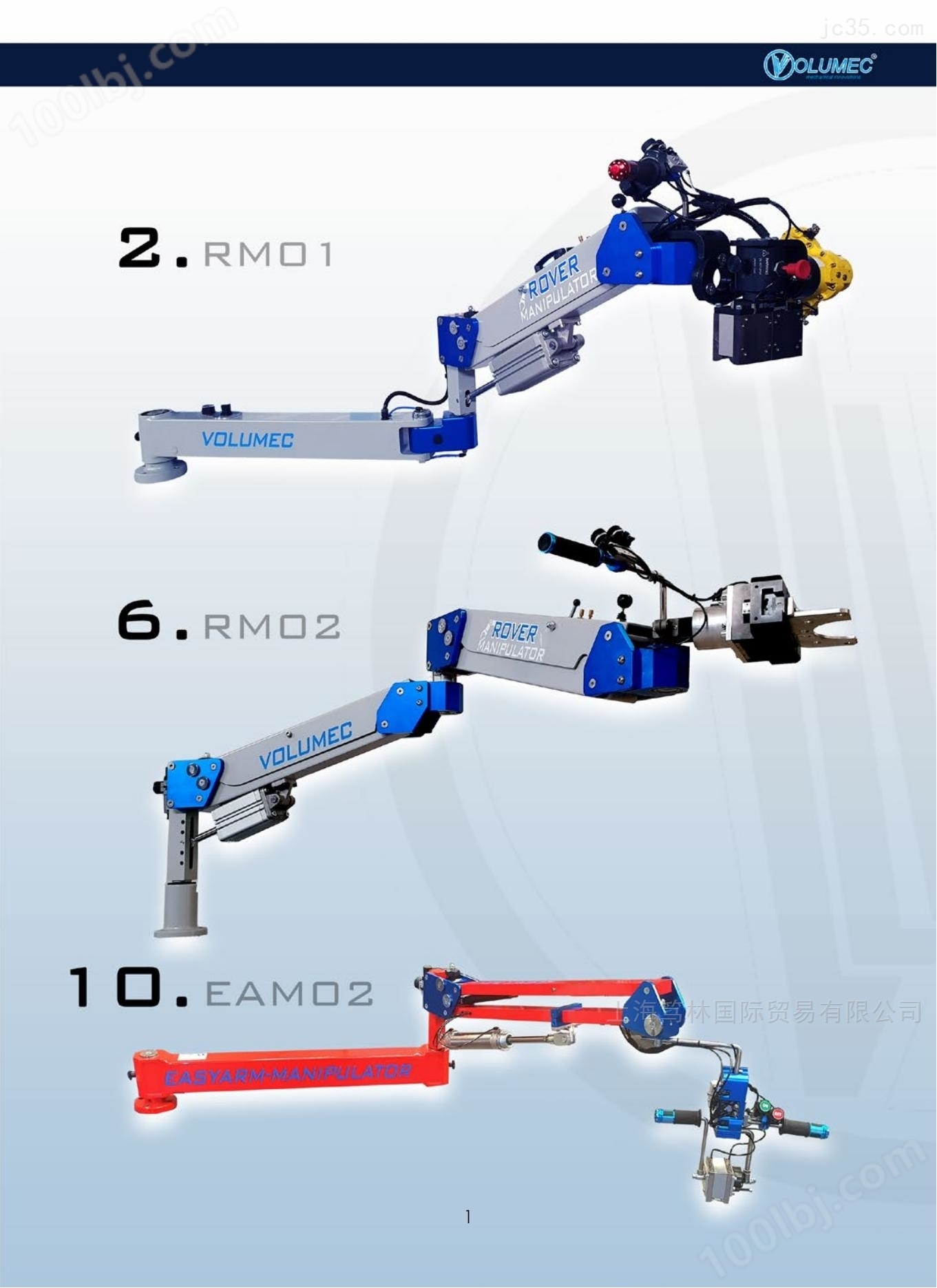
The ROVER and EAM are double or triple arm handling system designed to allow the operator to handle objects of various shapes and sizes with a maximum weight of 100kg.
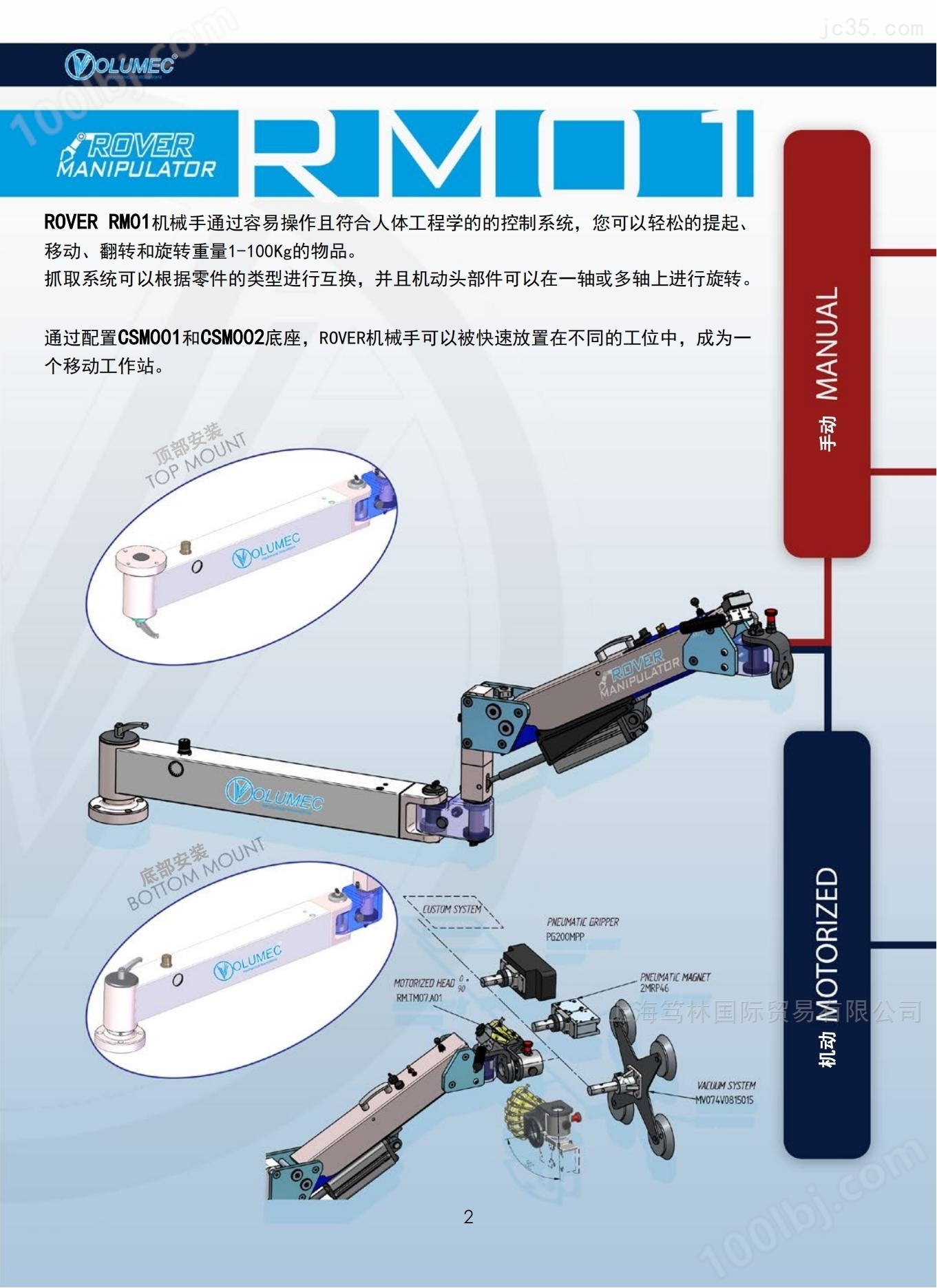
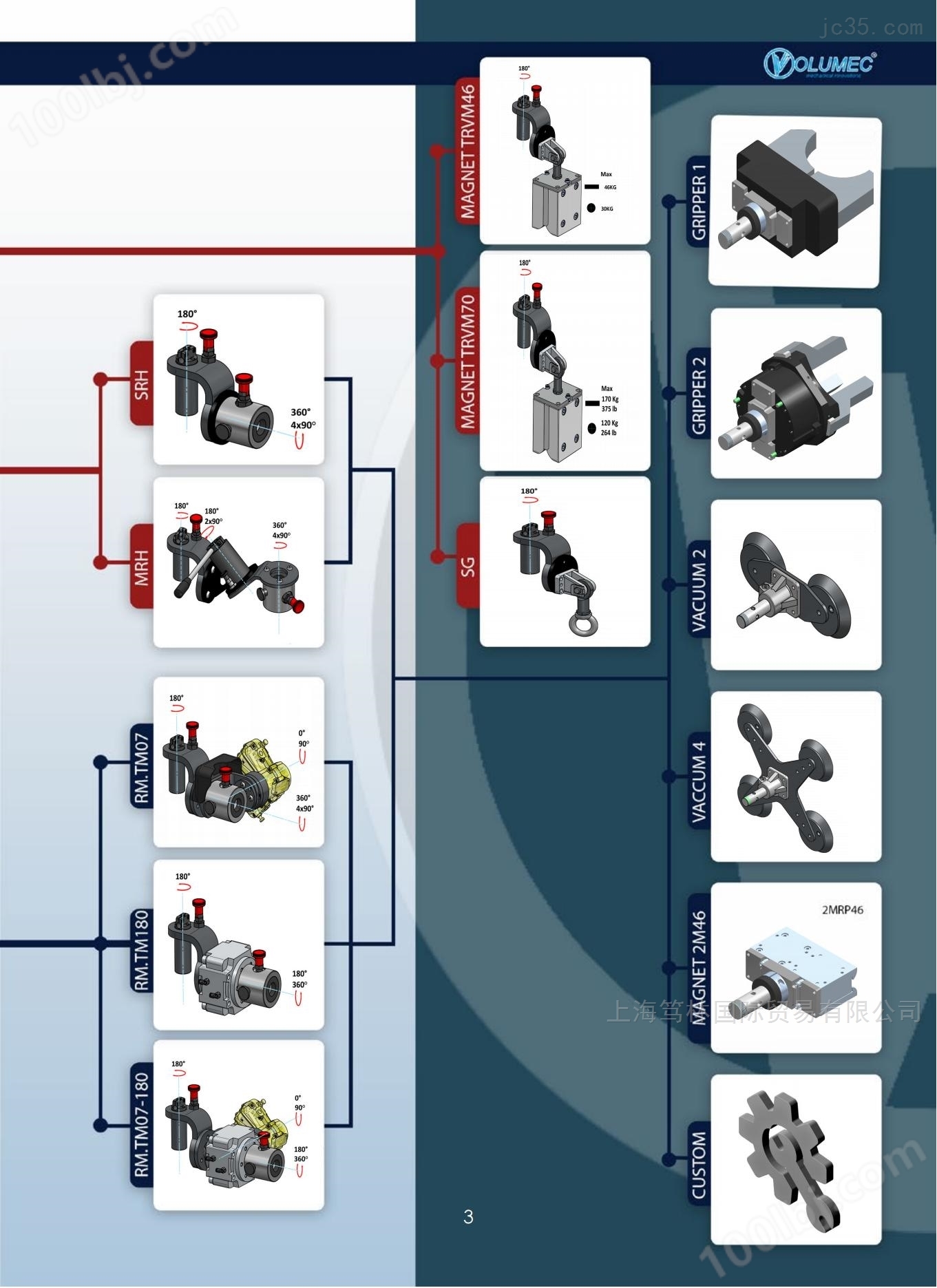
The lifting system is entirely pneumatic and is carried out by using a joystick and a handlebar equipped with controls to operate the gripping system,which can be pneumatic magnet ,vacuum or collet,depending on the type of part to be handled.
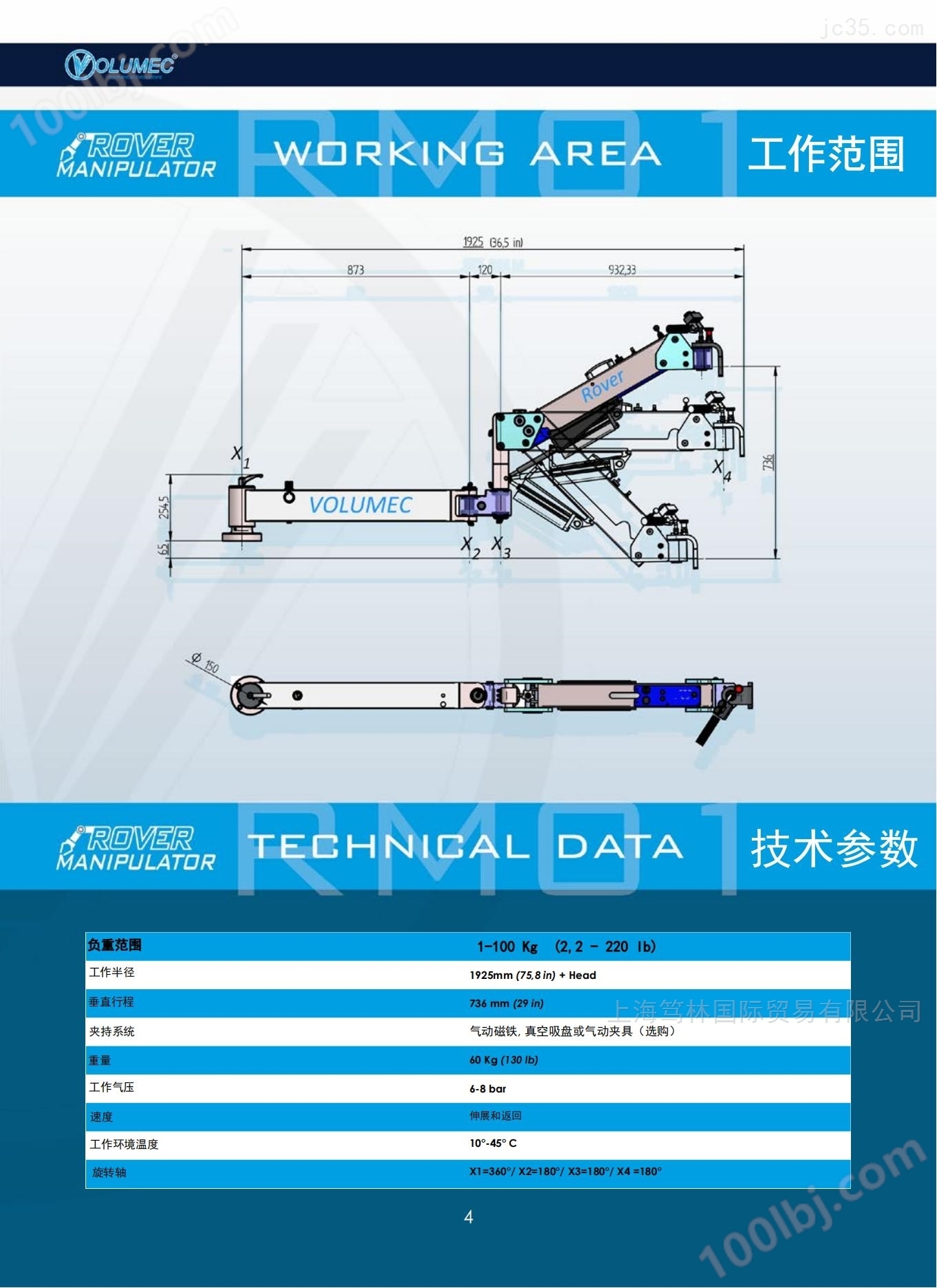
Able to rotate 360° and with a working radius of to 2160mm,the rover and eam manipulator are unique solutions on the market that improve production times and safety in the working environment.
On request,Volumec also produces handling system tailored to the specific needs of the customer.
意大利巍卢嵋克Volumec公司生产的ROVER移动助力机械手臂是由双力臂或三力臂组成的搬运系统,允许操作员搬运各种形状和尺寸的物体,ZUI大可搬运重量为100kg。
ROVER和EAM机械手臂的提升系统全部是通过气动来完成,操作员通过使用操纵杆和手柄来执行,手柄上配有控制装置来操作夹持系统,夹持系统可以选用气动磁铁、真空吸盘或气动夹具,具体选择取决于要处理的零件类型。
该机械手臂能够360°旋转,工作半径大可达2160mm,ROVER和EAM移动装卸搬运机械手臂是市场上*的解决方案,可提高生产效率和加强工作安 全性。
我们可根据客户的特殊要求,定制特殊的装卸系统。
ROVER移动助力机械手臂型号:RM01 和RM02
技术参数:
选购附件:
客户案例


EAM机械手臂的型号:EAM2-0、EAM2-1、EAM2-2、EAM2-12、EAM3-00、EAM3-01、EAM3-02、EAM3-012