
产品名称:电涡流位移传感器

产品简介
详细信息
一、电涡流位移传感器工作原理:
电涡流传感器系统的工作原理是电涡流效应,属于一种电感式测量原理。电涡流效应源自振荡电路的能量。而电涡流需要在可导电的材料内才可以形成。给传感器探头内线圈导入一个交变电流,可以在探头线圈周围形成一个磁场。如果将一个导体放入这个磁场,根据法拉第电磁感应定律,导体内会激发出电涡流。根据楞兹定律,电涡流的磁场方向与线圈磁场正好相反,而这将改变探头内线圈的阻抗值。这个阻抗值的变化与线圈到被测物体之间的距离直接相关。传感器探头连接到控制器后,控制器可以从传感器探头内获得电压值的变化量,并以此为依据,计算出对应的距离值,电涡流测量原理可以测量所有导电材料。由于电涡流可以穿透绝缘体,即使表面覆盖有绝缘体的金属材料,也可以作为电涡流传感器的被测物体。的圈式绕组设计在实现传感器外形较致紧凑的同时,可以满足其运转于高温测量环境的要求。
二、应用范围:
通过测量金属被测体与探头端的相对位置、电涡流位移传感器感应并处理成相应的电信号输出。传感器可长期可靠工作、灵敏度高、抗干扰能力强、非接触测量、响应速度快不受油水等介质的影响,在大型旋转机械的轴位移、轴振动、轴转速等参数进行长期实时监测中被广泛应用,并且被扩展到卫星发射、材料鉴定、称重测量、金属板厚测量、材料形变量等应用领域。
三、电涡流位移传感器性能参数:
| 测量量程 | 1mm | 2mm | 4mm | 5mm | 12.5mm | 20mm | 25mm | 50mm |
| 探头直径 | Φ6mm | Φ8mm | Φ11mm | Φ17mm | Φ30mm | Φ40mm | Φ50mm | Φ60mm |
| 线性误差 (%FS) | ≤±0.25 | ≤±0.25 | ≤±0.5 | ≤±0.5 | ≤±1 | ≤±1 | ≤±1 | ≤±2 |
| 分辨率 | 0.05um | 0.1um | 0.2um | 0.25um | 0.625um | 1.0um | 1.25um | 2.5um |
| 重复性 | 0.1um | 0.2um | 0.4um | 0.5um | 1.25um | 2.0um | 2.5um | 5um |
| 频率响应 (-3dB) | 0~10KHz | 0~8KHz | 0~2KHz | 0~1KHz | ||||
| 输出信号 | 0~5V,0~10V,4~20mA,RS485 | |||||||
| 供电电压 | 电压型+9~18VDC,+18~36VDC或±15V~±18VDC可选 | |||||||
| 电流型+22~30VDC,RS485型+12VDC | ||||||||
| 工作电流 | 电压型<45mA | |||||||
| 电流型<25mA | ||||||||
| RS485型<40mA | ||||||||
| 纹波 | ≤20mV | |||||||
| 系统温漂 | ≤0.05%/℃ | |||||||
| 静态灵敏度 | 根据输出信号和对应量程而定 | |||||||
| 输出负载 | 电压输出:负载能力<10KΩ | |||||||
| 电流输出:负载能力<500Ω | ||||||||
| 标定时 环境温度 | (20±5)℃ | |||||||
| 使用温度 | 探头-30℃~+150℃ | |||||||
| 前置器-30℃~+85℃ | ||||||||
| 防护等级 | 探头 IP67 | |||||||
| 前置器 IP65 | ||||||||
| 探头电缆 | 默认2m,可定制 | |||||||
| 电源电缆 | 默认2m,可定制 | |||||||
四、电涡流位移传感器接线定义:
|
| 电流型 | 电压型 | RS485 |
| 棕线 | 电源正 +24VDC | 电源正 +12VDC或+24VDC | 电源正 +12VDC |
| 黑线 | 空 | 电源负 0V | 电源负 0V |
| 蓝线 | 电流输出 OUT | 输出正 OUT+ | RS485 A+ |
| 白线 | 空 | 输出负 OUT- | RS485 B- |
| 屏蔽线 | 接大地 GND | 接大地 GND | 接大地 GND |
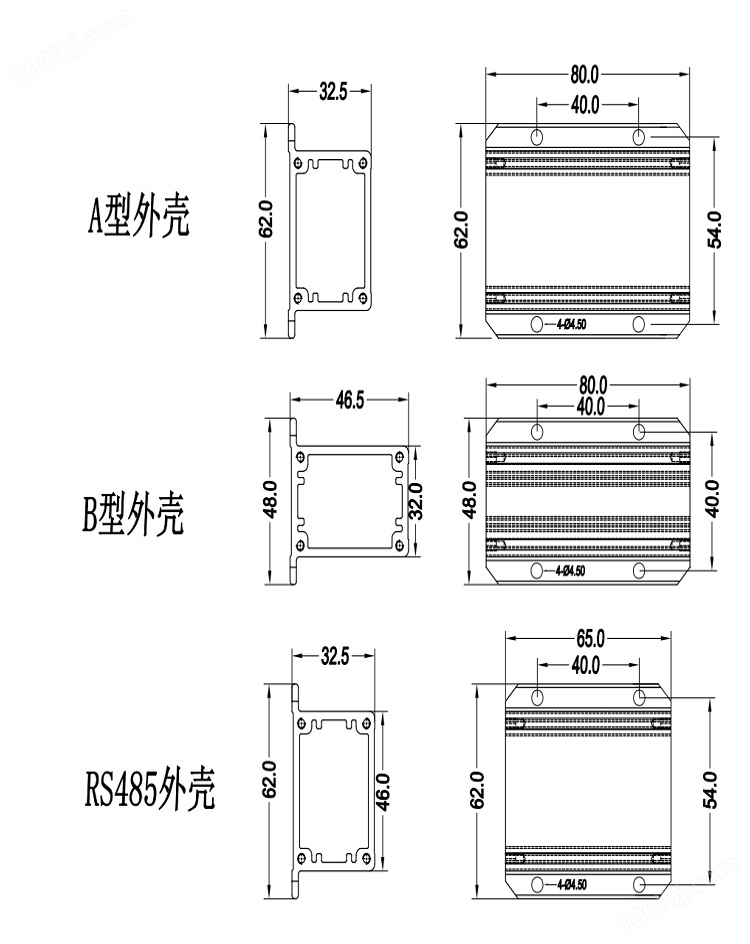
五、电涡流位移传感器产品尺寸
ML33传感器系统有探头、前置器、电缆以及附件组成。
1、电涡流位移传感器探头:
通常探头由线圈、头部、壳体、高频电缆、高频接头组成。
在制作过程中,探头头部体一般采用耐高温ABS+PC工程塑料,通过“二次注塑”成型将线圈密封其中。使探头在恶劣的环境中能可靠工作。由于头部体线圈直径决定传感器系统的线性量程,因此我们通常用头部体外部直径来分类和表征各型号探头,一般情况下传感器系统的线性量程大致是探头头部直径的1/2~1/4倍。ML33系列传感器共有Φ6、Φ8、Φ11,Φ17、Φ30、Φ40、Φ50、Φ60共8种直径的头部 见图所示:
| 名称 | 探头长度 | 代号 | 量程 | 安装类型 | 螺纹规格 |
| Φ6mm 探头 | 5mm | 01 | 1mm | 标准 | M8X1.0 |
| Φ8mm探头 | 7mm | 02 | 2mm | 标准 | M9X1.0 |
| Φ11mm探头 | 8mm | 04 | 4mm | 标准 | M14X1.5 |
| Φ17mm探头 | 11mm | 05 | 5mm | 标准 | M18X1.0 |
| Φ30mm探头 | 26mm | 12 | 12.5mm | 反装 | M14X1.5 |
| Φ40mm探头 | 33mm | 20 | 20mm | 反装 | M14X1.5 |
| Φ50mm探头 | 42mm | 25 | 25mm | 反装 | M18X1.5 |
| Φ60mm探头 | 47mm | 50 | 50mm | 反装 | M18X1.5 |
探头壳体用于连接和固定探头头部,并用为探头安装时的装夹结构。壳体一般采用黄铜镀镍工艺制成,上面刻有标准螺纹,并备有锁紧螺母。为了能适应不同的应用和安装场合,探头壳体具有不同的形式和不同的螺纹及尺寸规格。
2、电涡流位移传感器前置器:
前置器是整个传感器系统的信号处理中心。一方面,前置器为探头线圈提供高频交流激励电流使探头工作;另一方面,前置器通过特殊电路感应出探头头部体与头部体前金属导体的间隙变化,经过前置器的处理,产生随间隙线性变化而变化的电压或电流输出信号。
ML33前置器外形尺寸图:
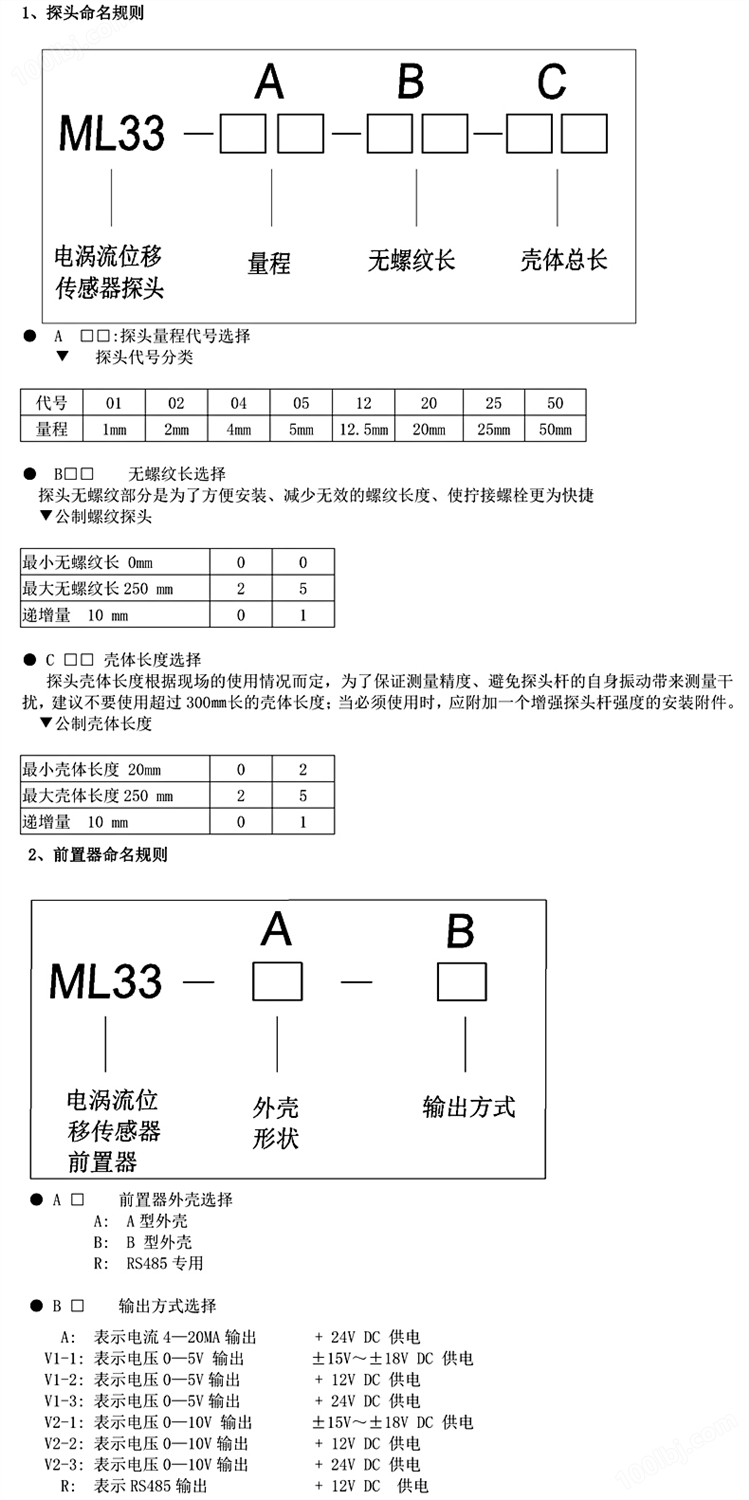
六、选型指导:
七、电涡流位移传感器注意事项
1、对探头安装间隙的要求:
安装探头时,应考虑传感器的线性测量范围和被测间隙的变化量,当被测间隙总的变化量与传感器的线性工作范围接近时,尤其要注意(在订货选型时应使所选的传感器线性范围大于被测间隙的15%以上)。通常,测量振动时,将探头的安装间隙设在传感器的线性中点;测量位移时,要根据位移往哪个方向变化或往哪个方向的变化量较大来决定其安装间隙的设定。 当位移向远离探头端部的方向变化时,安装间隙应设定在线性近端;反之,则应设在线性远端。
调整探头安装间隙可以采用下列方法:
连接好探头、延伸电缆、前置器,接通传感器系统电源,用万用表电压档监测前置器的输出,同时调节探头与被测面的间隙,当前置器的输出等于安装间隙所对应的电压或电流时(该值可由传感器校准数据单中查得),再拧紧探头所带的两个紧固螺母即可。
通过测量前置器输出电压来确定安装间隙,有可能会产生一种假象:当探头头部还未露出安装孔时,由于安装孔周围的金属影响,可能使得前置器的输出等于安装间隙所对应的电压或电流输出值。探头调整到正确的安装位置,前置器的输出应该是:首先是较大的饱和输出(此时探头还未放进安装孔中),然后是较小的输出(此时探头放进安装孔内),继续将探头塞进安装孔,前置器的输出会变为较大的输出( 此时探头头部露出安装孔,但与被测面的间隙较大),再继续塞进探头,前置器的输出等于安装间隙所对应的值,此时探头才是正确的安装间隙。
2、对初始间隙的要求:
各种型号电涡流传感器,都是在一定的间隙电压值下它的读数才有较好的线性度,所以在安装传感器时必须调整好合适的初始间隙,对每一套产品都会进行特性试验,绘出相应的特性曲线,工程技术人员在使用传感器的时候必须仔细研究配套的校验证书,认真分析特性曲线,以确定传感器是否满足所要测量的间隙,一般传感器直径越大所测量间隙也越大。
3、对探头支架的要求:
电涡流传感器安装在固定支架上,因此支架的好坏直接决定测量的效果,这就要求支架应有足够的刚度以提高自振频率,避免或减小被测体振动时支架也同时受激自振,支架的自振频率至少应为机械旋转速度的10倍,支架应与被测表面切线方向平行,传感器垂直安装在支架上,虽然探头的中心线在垂直方向偏15°角时对系统特性没有影响,但较好还是保证传感器与被测面垂直。
4、被测体材料对传感器测量结果的影响:
传感器特性与被测体的电导率磁导率有关,当被测体为导磁材料(如普通钢、结构钢等)时,由于涡流效应和磁效应同时存在,且磁效应反作用于涡流效应,使得涡流效应减弱,即传感器的灵敏度降低。而当被测体为弱导磁材料(如铜,铝,合金钢等)时,由于磁效应弱,相对来说涡流效应要强,因此传感器感应灵敏度要高。
铜: 14.9V/mm
铝: 14.0V/mm
不锈钢(1Cr18Ni9Ti): 10.4V/mm
45号钢: 8.2V/mm
40CrMo钢: 8.0V/mm
5、被测体表面加工状况对传感器测量结果的影响:
被测体正对探头的表面光洁度也会影响测量结果!不光滑的被测体表面,在实际的测量应用中会带来较大的附加误差,特别是对于振动测量,误差信号与实际的振动信号叠加一起,并且在电气上很难分离,因此被测表面应该光洁,不应存在刻痕、洞眼、凸台、凹槽等缺陷(对于特意为键相器、转速测量设置的凸台或凹槽除外)。一般对于振动测量的被测表面粗糙度要求在0.4um~0.8um之间;对于位移测量被测表面粗糙度要求在0.4um~1.6um之间。如果不能满足,需要对被测面进行衍磨或抛光。
6、被测体表面残磁效应对传感器的影响:
电涡流效应主要集中在被测体表面,如果由于加工过程中形成残磁效应,以及淬火不均匀、硬度不均匀、金相组织不均匀、结晶结构不均匀等都会影响传感器特性。在进行振动测量时,如果被测体表面残磁效应过大,会出现测量波形发生畸变。
7、被测体表面镀层对传感器的影响:
被测体表面的镀层对传感器的影响相当于改变了被测体材料,视其镀层的材质、厚薄,传感器的灵敏度会略有变化。
8、被测体表面尺寸对传感器的影响:
由于探头线圈产生的磁场范围是一定的,而被测体表面形成的涡流场也是一定的。这样就对被测体表面大小有一定要求。为了防止电涡流产生的磁场影响仪器的正常输出安装时传感器头部四周必须留有一定范围的非导电介质空间,如果在某一部位要同时安装两个以上的传感器,就必须考虑是否会产生交叉干扰,两个探头之间一定要保持规定的距离。
通常,当被测体表面为平面时,以正对探头中心线的点为中心,被测面直径应大于探头头部直径的1.5倍以上;当被测体为圆轴且探头中心线与轴心线正交时,一般要求被测轴直径为探头头部直径的3倍以上,否则传感器的灵敏度会下降,被测体表面越小,灵敏度下降越多。当被测体表面大小与探头头部直径相同,其灵敏度会下降到72%左右。被测体的厚度也会影响测量结果。被测体中电涡流场作用的深度由频率、材料导电率、导磁率决定。因此如果被测体太薄,将会造成电涡流作用不够,使传感器灵敏度下降,一般要求厚度大于0.1mm以上的钢等导磁材料及厚度大于0.05mm以上的铜、铝等弱导磁材料,则灵敏度不会受其厚度的影响。
9、高频同轴电缆对传感器的影响:
高频同轴电缆也是影响电涡流传感器电气性能的一个主要原因。由于传感器工作在高频状态(振荡频率约1MHZ左右),所以高频同轴电缆的频率衰减、温度特性、阻抗、长度等都成为影响传感器性能的因素!
10、外界磁场对传感器的影响:
电涡流传感器属于电感式传感器,由于其主要作用原理就是电涡流效应,所以,对于外界磁场的影响在工程应用中应该充分考虑!强的外界磁场肯定会影响传感器的性能。
对于外界静磁场,由于静磁场强度是一定的,方向与涡流磁场可能呈现现各种状况,而一旦外界静磁场方向确定,其对涡流磁场的干扰也是一定的了。所以在实际的工程应用中,静磁场的影响可以通过现场的试验测量出传感器灵敏度的变化,通过后续电路或软件算法排除。
对于外界交变磁场,例如大型励磁机、频繁启动的大型电机、启动机等,其磁场方向和强度都可能不是一个确定的值,因而产生的量使涡流传感器远记交变磁场的作用范围,或采取磁场屏蔽措施使产生的影响较小。